一、概述
1.1 BLDC及其組成
無刷直流電機采用電子換向器替代了傳統直流電動機的機械換向裝置,從而克服了電刷和換向器所引起的噪聲、火花、電磁干擾、壽命短等一系列弊病。這種類型的電機既具備交流電機的結構簡單、運行可靠、維護方便等一系列優點,又具有直流電機的運行效率高、無勵磁損耗以及調速性能好等優點,在工業領域中的應用越來越廣泛,典型應用包括但不限于:家用電器、電動工具、電動自行車、電動摩托車、電動平衡車等領域。
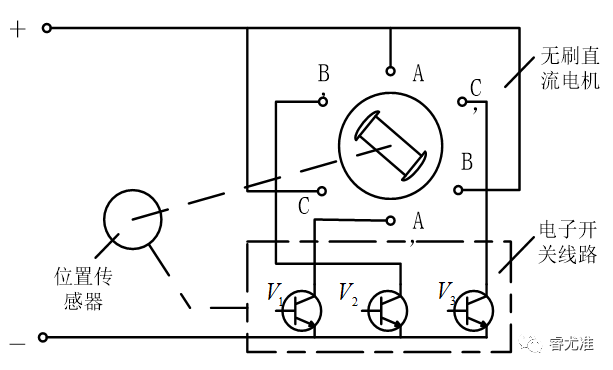
圖1-1 無刷直流電機的組成
無刷直流電機的組成如圖1-1所示,主要包括電機本體、位置傳感器和電子開關線路。
1.2 BLDC的工作原理
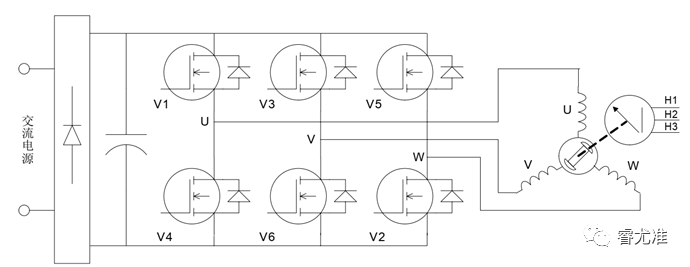
圖1-2 BLDC的控制原理簡圖
無刷直流電機的控制簡圖如圖1-2所示,主電路是一個典型的電壓型交-直-交電路,逆變器提供等幅等頻5-24KHz調制波的對稱交變矩形波。永磁體N-S交替交換,使位置傳感器產生相位差120〫的H3、H2、H1方波,從而產生有效的六狀態編碼信號:010、011、001、101、100、110,通過邏輯組件處理產生V6-V1導通、V5-V6導通、V4-V5導通、V3-V4導通、V2-V3導通、V1-V2導通,也就是說將直流母線電壓依次加在U->V、W->V、W->U、V->U、V->W、U->W上,這樣轉子每轉過一對N-S極,V1、V2、V3、V4、V5、V6各功率管即按固定組合成六種狀態依次導通,如圖1-3所示。

圖1-3 兩相導通星形三相六狀態時繞組和MOS管導通順序表每種狀態下,僅有兩相繞組通電,依次改變一種狀態,定子繞組產生的磁場軸線在空間轉動60〫電角度,轉子跟隨定子磁場轉動相當于60〫電角度空間位置,轉子在新位置上,使位置傳感器U、V、W按約定產生一組新編碼,新的編碼又改變了功率管的導通組合,使定子繞組產生的磁場軸再前進60〫電角度。如此循環,無刷直流電動機將產生連續轉矩,拖動負載作連續旋轉。
二、BLDC的主流驅動方式
目前,BLDC主要有三種驅動方式:方波控制(也稱為梯形波控制、120°控制或6步換向控制)、正弦波控制和FOC控制(又稱為矢量變頻、磁場矢量定向控制)。

基本原理(見圖2-1):
- 使用霍爾傳感器或者無感估算算法獲得電機轉子的位置;
- 根據轉子的位置在360°的電氣周期內,進行6次換向(每60°換向一次);
優點:控制算法簡單、硬件成本較低,使用性能普通的控制器便能獲得較高的電機轉速;
缺點:轉矩波動大、存在一定的電流噪聲、效率達不到最大值。
應用場景:適用于對電機轉動性能要求不高的場合。
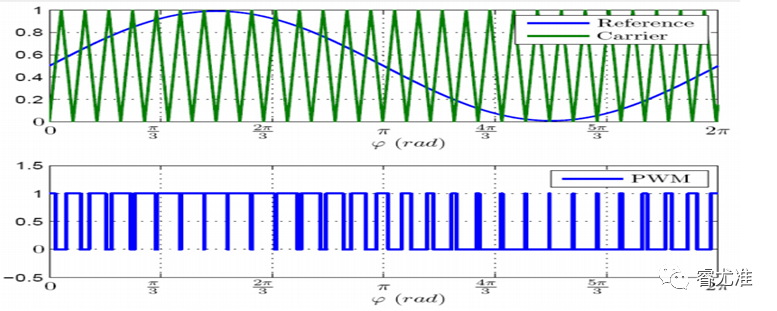

其基本原理如圖2-2所示,具體表述如下:
優點:轉矩波動較小,電流諧波少,無換向電流突變,電機運行噪聲小;
缺點:對控制器的性能要求較高,電機效率不能發揮到最大值。
應用場景:對電機運行噪聲要求較高的場合。
FOC控制方式可以認為是正弦波控制的升級版本,實現了電流矢量的控制,亦即實現了電機定子磁場的矢量控制。
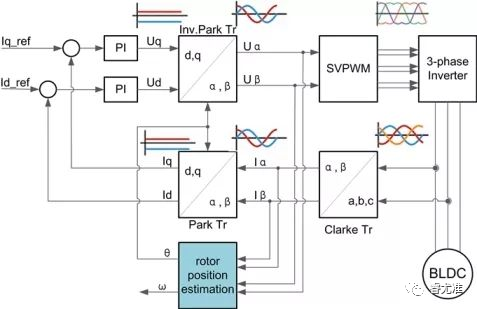
圖2-3 FOC控制的基本原理
其基本原理如圖2-3所示,具體表述如下:
優點:轉矩波動小、效率高、噪聲小、動態響應快;
缺點:硬件成本較高、對控制器性能有較高要求,電機參數需匹配。
三、哪種方式更適合未來的發展?
FOC是目前無刷直流電機(BLDC)高效控制的最佳選擇,它能夠精確地控制磁場的大小與方向,使得電機轉矩平穩、噪聲小、效率高,并且具有高速的動態響應。目前已在很多應用上逐步替代傳統的控制方式,在運動控制行業中備受矚目。 |