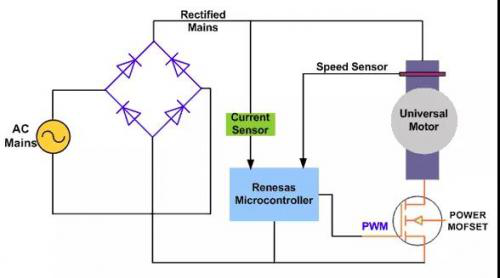
ҹoЛўлҠҷCҢЩУЪЧФ“QБчРНЈЁЧФОТ·ҪПтЮD“QЈ©Ј¬ТтҙЛҝШЦЖЖрҒнёьјУҸНлsЎЈ
BLDCлҠҷCҝШЦЖТӘЗуБЛҪвлҠҷCЯMРРХыБчЮDПтөДЮDЧУО»ЦГәНҷCЦЖЎЈҢҰУЪй]ӯhЛЩ¶ИҝШЦЖЈ¬УРғЙӮҖёҪјУТӘЗуЈ¬јҙҢҰУЪЮDЧУЛЩ¶И»тлҠҷCлҠБчТФј°PWMРЕМ–ЯMРРңyБҝЈ¬ТФҝШЦЖлҠҷCЛЩ¶ИТФј°№ҰВКЎЈ
BLDCлҠҷCҝЙТФёщ“ю‘ӘУГТӘЗуІЙУГЯ…ЕЕБР»тЦРРДЕЕБРPWMРЕМ–ЎЈҙу¶а”ө‘ӘУГғHТӘЗуЛЩ¶ИЧғ»ҜІЩЧчЈ¬ҢўІЙУГ6ӮҖӘҡБўөДЯ…ЕЕБРPWMРЕМ–ЎЈЯ@ҫНМṩБЛЧоёЯөД·ЦұжВКЎЈИз№ы‘ӘУГТӘЗу·ю„ХЖч¶ЁО»ЎўДЬәДЦЖ„У»т„УБҰө№ЮDЈ¬НЖЛ]К№УГСaідөДЦРРДЕЕБРPWMРЕМ–ЎЈ
һйБЛёР‘ӘЮDЧУО»ЦГЈ¬BLDCлҠҷCІЙУГ»ф –Р§‘ӘӮчёРЖчҒнМṩҪ^ҢҰ¶ЁО»ёР‘ӘЎЈЯ@ҫНҢ§ЦВБЛёь¶аҫҖөДК№УГәНёьёЯөДіЙұҫЎЈҹoӮчёРЖчBLDCҝШЦЖКЎИҘБЛҢҰУЪ»ф –ӮчёРЖчөДРиТӘЈ¬¶шКЗІЙУГлҠҷCөД·ҙлҠ„У„ЭЈЁлҠ„У„ЭЈ©ҒноAңyЮDЧУО»ЦГЎЈҹoӮчёРЖчҝШЦЖҢҰУЪПспLЙИәНұГЯ@ҳУөДөНіЙұҫЧғЛЩ‘ӘУГЦБкPЦШТӘЎЈФЪІЙУГ BLDC лҠҷC•rЈ¬ұщПдәНҝХХ{үәҝsҷCТІРиТӘҹoӮчёРЖчҝШЦЖЎЈҙу¶а”өBLDCлҠҷCІ»РиТӘ»ҘСaөДPWMЎўҝХЭd•rйgІеИл»тҝХЭd•rйgСaғ”ЎЈҝЙДЬ•юТӘЗуЯ@Р©МШРФөДBLDC‘ӘУГғHһйёЯРФДЬBLDCЛЕ·юлҠ„УҷCЎўХэПТІЁјӨ„оКҪBLDCлҠҷCЎўҹoЛўACЎў»тPCН¬ІҪлҠҷCЎЈ
ҝШЦЖЛг·ЁФS¶аІ»Н¬өДҝШЦЖЛг·Ё¶јұ»УГТФМṩҢҰУЪBLDCлҠҷCөДҝШЦЖЎЈөдРНЧц·ЁКЗЈ¬Ңў№ҰВКҫ§уw№ЬУГЧчҫҖРФ·ҖүәЖчҒнҝШЦЖлҠҷCлҠүәЎЈ®”тҢ„УёЯ№ҰВКлҠҷC•rЈ¬Я@·N·Ҫ·ЁІўІ»ҢҚУГЎЈёЯ№ҰВКлҠҷCұШнҡІЙУГPWMҝШЦЖЈ¬ІўТӘЗуТ»ӮҖОўҝШЦЖЖчҒнМṩЖр„УәНҝШЦЖ№ҰДЬЎЈҝШЦЖЛг·ЁұШнҡМṩПВБРИэн—№ҰДЬЈә▪ УГУЪҝШЦЖлҠҷCЛЩ¶ИөД PWM лҠүә;
▪ УГУЪҢҰлҠҷCЯMХыБч“QПтөДҷCЦЖ;
▪ АыУГ·ҙлҠ„У„Э»т»ф –ӮчёРЖчҒноAңyЮDЧУО»ЦГөД·Ҫ·Ё;
Г}ӣ_Ң’¶ИХ{ЦЖғHУГУЪҢўҝЙЧғлҠүә‘ӘУГөҪлҠҷCА@ҪMЎЈУРР§лҠүәЕcPWMХјҝХұИіЙХэұИЎЈ®”өГөҪЯm®”өДХыБч“QПт•rЈ¬BLDCөДЕӨҫШЛЩ¶ИМШРФЕcТФПВЦұБчлҠҷCПаН¬ЎЈҝЙТФУГҝЙЧғлҠүәҒнҝШЦЖлҠҷCөДЛЩ¶ИәНҝЙЧғЮDҫШЎЈ
ҲD1№ҰВКҫ§уw№ЬөД“QПтҢҚ¬FБЛ¶ЁЧУЦРөДЯm®”А@ҪMҝЙёщ“юЮDЧУО»ЦГЙъіЙЧојСөДЮDҫШЎЈФЪТ»ӮҖBLDCлҠҷCЦРЈ¬MCUұШнҡЦӘөАЮDЧУөДО»ЦГІўДЬүтФЪЗЎ®”өД•rйgЯMРРХыБч“QПтЎЈ
BLDCлҠҷCөДМЭРОХыБч“QПтЈ¬ҢҰУЪЦұБчҹoЛўлҠҷCІЙУГЛщЦ^өДМЭРОХыБч“QПтКЗЧоәҶҶОөД·Ҫ·ЁЦ®Т»ЎЈ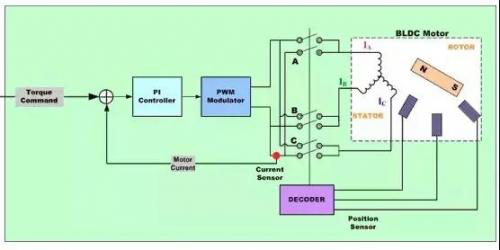
ҲD2ЈәУГУЪBLDCлҠҷCөДМЭРОҝШЦЖЖчөДәҶ»ҜҝтҲD
ФЪҲD 2 ЦРЈ¬ГҝТ»ҙОТӘНЁЯ^Т»ҢҰлҠҷCҪK¶ЛҒнҝШЦЖлҠБчЈ¬¶шөЪИэӮҖлҠҷCҪK¶ЛҝӮКЗЕcлҠФҙлҠҢWЙП”ай_ЎЈЗ¶ИлҙулҠҷCЦРөДИэ·N»ф –ЖчјюУГУЪМṩ”өЧЦРЕМ–Ј¬ЛьӮғФЪ60¶ИөДЙИРО…^ғИңyБҝЮDЧУО»ЦГЈ¬ІўФЪлҠҷCҝШЦЖЖчЙПМṩЯ@Р©РЕПўЎЈУЙУЪГҝҙОғЙӮҖА@ҪMЙПөДлҠБчБҝПаөИЈ¬¶шөЪИэӮҖА@ҪMЙПөДлҠБчһйБгЈ¬Я@·N·Ҫ·ЁғHДЬ®aЙъҫЯУРБщӮҖ·ҪПтЖдЦРЦ®Т»өДлҠБчҝХйgКёБҝЎЈлSЦшлҠҷCөДЮD„УЈ¬лҠҷCҪK¶ЛөДлҠБчФЪГҝЮD 60 ¶И•rЈ¬ҢҚ¬FТ»ҙОлҠй_кPЈЁХыБч“QПтЈ©Ј¬ТтҙЛлҠБчҝХйgКёБҝҝӮКЗФЪ 90 ¶ИПаТЖөДЧоҪУҪь 30 ¶ИөДО»ЦГЎЈ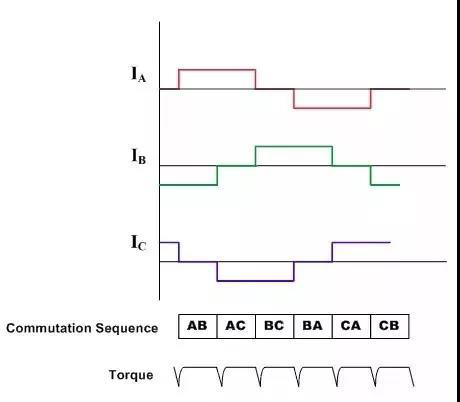
ҲD3ЈәМЭРОҝШЦЖЈәтҢ„УІЁРОәНХыБчМҺөДЮDҫШ
ТтҙЛГҝӮҖА@ҪMөДлҠБчІЁРНһйМЭРОЈ¬ҸДБгй_КјөҪХэлҠБчФЩөҪБгИ»әуФЩөҪШ“лҠБчЎЈ
Я@ҫН®aЙъБЛлҠБчҝХйgКёБҝЈ¬®”ЛьлSЦшЮDЧУөДРэЮDФЪ 6 ӮҖІ»Н¬өД·ҪПтЙПЯMРРІҪЙэ•rЈ¬ЛьҢўҪУҪьЖҪәвРэЮDЎЈ
ФЪПсҝХХ{әНұщПдЯ@ҳУөДлҠҷC‘ӘУГЦРЈ¬ІЙУГ»ф –ӮчёРЖчІўІ»КЗТ»ӮҖІ»ЧғөДЯx“сЎЈФЪ·ЗВ“А@ҪMЦРёР‘ӘөД·ҙлҠ„У„ЭӮчёРЖчҝЙТФУГҒнИЎөГПаН¬өДҪY№ыЎЈ
Я@·NМЭРОтҢ„УПөҪyТтЖдҝШЦЖлҠВ·өДәҶТЧРФ¶ш·ЗіЈЖХНЁЈ¬ө«КЗЛьӮғФЪХыБчЯ^іМЦР…sТӘФвУцЮDҫШјyІЁҶ–о}ЎЈ
BLDCлҠҷCөДХэПТХыБч“QПтМЭРОХыБч“QПтЯҖІ»ЧгТФһйМṩЖҪәвЎўҫ«ңКөДҹoЛўЦұБчлҠҷCҝШЦЖЎЈЯ@ЦчТӘКЗТтһйФЪТ»ӮҖИэПаҹoЛўлҠҷCЈЁҺ§УРТ»ӮҖХэҪyІЁ·ҙлҠ„У„ЭЈ©ЦРЛщ®aЙъөДЮDҫШУЙПВБРөИКҪҒн¶ЁБxЈә
ЮDЭSЮDҫШ=Kt [IRSinЈЁoЈ©+ISSinЈЁo+120Ј©+ITSinЈЁo+240Ј©]ЖдЦРЈә
o һйЮDЭSөДлҠҪЗ¶И
Kt һйлҠҷCөДЮDҫШіЈ”ө
IRЈ¬IS әН IT һйПаО»лҠБч
Из№ыПаО»лҠБчКЗХэПТөДЈәIR=I0SinoЈ»IS=I0SinЈЁ+120oЈ©Ј»IT=I0SinЈЁ+240oЈ©
ҢўөГөҪЈәЮDЭSЮDҫШ=1.5I0*KtЈЁТ»ӮҖӘҡБўУЪЮDЭSҪЗ¶ИөДіЈ”өЈ©
ХэПТХыБч“QПтҹoЛўлҠҷCҝШЦЖЖчЕ¬БҰтҢ„УИэӮҖлҠҷCА@ҪMЈ¬ЖдИэВ·лҠБчлSЦшлҠҷCЮD„У¶шЖҪ·ҖөДЯMРРХэПТЧғ»ҜЎЈЯx“сЯ@Р©лҠБчөДПакPПаО»Ј¬Я@ҳУЛьӮғҢў•ю®aЙъЖҪ·ҖөДЮDЧУлҠБчҝХйgКёБҝЈ¬·ҪПтКЗЕcЮDЧУХэҪ»өД·ҪПтЈ¬ІўҫЯУРІ»ЧғБҝЎЈЯ@ҫНПыіэБЛЕcЮDПтПакPөДЮDҫШјyІЁәНЮDПтГ}ӣ_ЎЈ
һйБЛлSЦшлҠҷCөДРэЮDЈ¬ЙъіЙлҠҷCлҠБчөДЖҪ·ҖөДХэПТІЁХ{ЦЖЈ¬ҫНТӘЗуҢҰУЪЮDЧУО»ЦГУРТ»ӮҖҫ«ҙ_УРңyБҝЎЈ»ф –ЖчјюғHМṩБЛҢҰУЪЮDЧУО»ЦГөДҙЦВФУӢЛгЈ¬ЯҖІ»ЧгТФЯ_өҪДҝөДТӘЗуЎЈ»щУЪЯ@ӮҖФӯТтЈ¬ҫНТӘЗуҸДҫҺҙaЖч»тПаЛЖЖчјю°lіцҪЗ·ҙрҒЎЈ
ҲD4ЈәBLDC лҠҷCХэПТІЁҝШЦЖЖчөДәҶ»ҜҝтҲD
УЙУЪА@ҪMлҠБчұШнҡҪYәП®aЙъТ»ӮҖЖҪ·ҖөДіЈБҝЮDЧУлҠБчҝХйgКёБҝЈ¬¶шЗТ¶ЁЧУА@ҪMөДГҝӮҖ¶ЁО»Паҫа 120 ¶ИҪЗЈ¬ТтҙЛГҝӮҖҫҖҪMөДлҠБчұШнҡКЗХэПТөД¶шЗТПаТЖһй 120 ¶ИЎЈІЙУГҫҺҙaЖчЦРөДО»ЦГРЕПўҒнҢҰғЙӮҖХэПТІЁЯMРРәПіЙЈ¬ғЙӮҖйgөДПаТЖһй 120 ¶ИЎЈИ»әуЈ¬ҢўЯ@Р©РЕМ–іЛТФЮDҫШЦөЈ¬ТтҙЛХэПТІЁөДХс·щЕcЛщРиТӘөДЮDҫШіЙХэұИЎЈҪY№ыЈ¬ғЙӮҖХэПТІЁлҠБчГьБоөГөҪЗЎ®”өД¶ЁПаЈ¬ҸД¶шФЪХэҪ»·ҪПт®aЙъЮD„У¶ЁЧУлҠБчҝХйgКёБҝЎЈ
ХэПТлҠБчГьБоРЕМ–Э”іцТ»ҢҰФЪғЙӮҖЯm®”өДлҠҷCА@ҪMЦРХ{ЦЖлҠБчөДP-IҝШЦЖЖчЎЈөЪИэӮҖЮDЧУА@ҪMЦРөДлҠБчКЗКЬҝША@ҪMлҠБчөДШ“”өәНЈ¬ТтҙЛІ»ДЬұ»·Ц„eҝШЦЖЎЈГҝӮҖP-IҝШЦЖЖчөДЭ”іцұ»ЛНөҪТ»ӮҖPWMХ{ЦЖЖчЈ¬И»әуЛНөҪЭ”іцҳтәНғЙӮҖлҠҷCҪK¶ЛЎЈ‘ӘУГөҪөЪИэӮҖлҠҷCҪK¶ЛөДлҠүәФҙУЪ‘ӘУГөҪЗ°ғЙӮҖҫҖҪMөДРЕМ–өДШ“”өәНЈ¬УГУЪ·Ц„eйgёф 120 ¶ИөДИэӮҖХэПТлҠүәЎЈ
ҪY№ыЈ¬ҢҚлHЭ”іцлҠБчІЁРОҫ«ҙ_өДёъЫҷХэПТлҠБчГьБоРЕМ–Ј¬ЛщөГлҠБчҝХйgКёБҝЖҪ·ҖЮD„УЈ¬ФЪБҝЙПөГТФ·Җ¶ЁІўТФЛщРиөД·ҪПт¶ЁО»ЎЈ
Т»°гНЁЯ^МЭРОХыБчЮDПтЈ¬І»ДЬЯ_өҪ·Җ¶ЁҝШЦЖөДХэПТХыБчЮDПтҪY№ыЎЈИ»¶шЈ¬УЙУЪЖдФЪөНлҠҷCЛЩ¶ИПВР§ВКәЬёЯЈ¬ФЪёЯлҠҷCЛЩ¶ИПВҢў•ю·Цй_ЎЈЯ@КЗУЙУЪЛЩ¶ИМбёЯЈ¬лҠБч»ШБчҝШЦЖЖчұШнҡёъЫҷТ»ӮҖФцјУоlВКөДХэПТРЕМ–ЎЈН¬•rЈ¬ЛьӮғұШнҡҝЛ·юлSЦшЛЩ¶ИМбёЯФЪХс·щәНоlВКПВФцјУөДлҠҷCөД·ҙлҠ„У„ЭЎЈ
УЙУЪP-IҝШЦЖЖчҫЯУРУРПЮФцТжәНоlВКн‘‘ӘЈ¬ҢҰУЪлҠБчҝШЦЖ»ШВ·өД•rйgЧғБҝёЙ”_ҢўТэЖрПаО»ңюәуәНлҠҷCлҠБчЦРөДФцТжХ`ІоЈ¬ЛЩ¶ИФҪёЯЈ¬Х`ІоФҪҙуЎЈЯ@ҢўёЙ”_лҠБчҝХйgКёБҝПаҢҰУЪЮDЧУөД·ҪПтЈ¬ҸД¶шТэЖрЕcХэҪ»·ҪПт®aЙъО»ТЖЎЈ
®”®aЙъЯ@·NЗйӣr•rЈ¬НЁЯ^Т»¶ЁБҝөДлҠБчҝЙТФ®aЙъЭ^РЎөДЮDҫШЈ¬ТтҙЛРиТӘёь¶аөДлҠБчҒнұЈіЦЮDҫШЈ¬Р§ВКҪөөНЎЈ
лSЦшЛЩ¶ИөДФцјУЈ¬Я@·NҪөөНҢў•юСУАmЎЈФЪДі·NіМ¶ИЙПЈ¬лҠБчөДПаО»О»ТЖі¬Я^ 90 ¶ИЎЈ®”®aЙъЯ@·NЗйӣr•rЈ¬ЮDҫШңpЦБһйБгЎЈНЁЯ^ХэПТөДҪYәПЈ¬ЙПГжЯ@ьcөДЛЩ¶ИҢ§ЦВБЛШ“ЮDҫШЈ¬ТтҙЛТІҫНҹo·ЁҢҚ¬FЎЈ
1ЎўҳЛБҝҝШЦЖ
ҳЛБҝҝШЦЖЈЁ»т V/Hz ҝШЦЖЈ©КЗТ»ӮҖҝШЦЖЦёБолҠҷCЛЩ¶ИөДәҶҶО·Ҫ·ЁЎЈЦёБолҠҷCөД·Җ‘BДЈРНЦчТӘУГУЪ«@өГјјРgЈ¬ТтҙЛЛІ‘BРФДЬКЗІ»ҝЙДЬҢҚ¬FөДЎЈПөҪyІ»ҫЯУРлҠБч»ШВ·ЎЈһйБЛҝШЦЖлҠҷCЈ¬ИэПалҠФҙЦ»УРФЪХс·щәНоlВКЙПЧғ»ҜЎЈ
2ЎўКёБҝҝШЦЖ»тҙЕҲц¶ЁПтҝШЦЖ ФЪлҠ„УҷCЦРөДЮDҫШлSЦш¶ЁЧУәНЮDЧУҙЕҲцөД№ҰДЬ¶шЧғ»ҜЈ¬ІўЗТ®”ғЙӮҖҙЕҲц»ҘПаХэҪ»•rЯ_өҪ·еЦөЎЈФЪ»щУЪҳЛБҝөДҝШЦЖЦРЈ¬ғЙӮҖҙЕҲцйgөДҪЗ¶Ип@ЦшЧғ»ҜЎЈ
КёБҝҝШЦЖФO·ЁФЪ AC лҠҷCЦРФЩҙО„“ФмХэҪ»кPПөЎЈһйБЛҝШЦЖЮDҫШЈ¬ёчЧФҸД®aЙъөДҙЕНЁБҝЦРЙъіЙлҠБчЈ¬ТФҢҚ¬F DC ҷCЖчөДн‘‘ӘРФЎЈ
Т»ӮҖ AC ЦёБолҠҷCөДКёБҝҝШЦЖЕcТ»ӮҖҶОӘҡөД„оҙЕ DC лҠҷCҝШЦЖПаЛЖЎЈФЪТ»ӮҖ DC лҠҷCЦРЈ¬УЙ„оҙЕлҠБч IF Лщ®aЙъөДҙЕҲцДЬБҝҰөF ЕcУЙлҠҳРлҠБч IA Лщ®aЙъөДлҠҳРҙЕНЁҰөA ХэҪ»ЎЈЯ@Р©ҙЕҲц¶јҪӣЯ^ИҘсоІўЗТПа»ҘйgәЬ·Җ¶ЁЎЈТтҙЛЈ¬®”лҠҳРлҠБчКЬҝШТФҝШЦЖЮDҫШ•rЈ¬ҙЕҲцДЬБҝИФұЈіЦІ»КЬУ°н‘Ј¬ІўҢҚ¬FБЛёьҝмөДЛІ‘Bн‘‘ӘЎЈ
ИэПа AC лҠҷCөДҙЕҲц¶ЁПтҝШЦЖЈЁFOCЈ©°ьАЁДЈ·В DC лҠҷCөДІЩЧчЎЈЛщУРКЬҝШЧғБҝ¶јНЁЯ^”өҢWЧғ“QЈ¬ұ»ЮD“QөҪ DC ¶ш·З ACЎЈЖдДҝҳЛКЗӘҡБўөДҝШЦЖЮDҫШәНҙЕНЁЎЈҙЕҲц¶ЁПтҝШЦЖЈЁFOCЈ©УРғЙ·N·Ҫ·ЁЈәЦұҪУ FOCЈәЮDЧУҙЕҲцөД·ҪПтЈЁRotor flux angleЈ©КЗНЁЯ^ҙЕНЁУ^ңyЖчЦұҪУУӢЛгөГөҪөДЎЈ
йgҪУ FOCЈәЮDЧУҙЕҲцөД·ҪПтЈЁRotor flux angleЈ©КЗНЁЯ^ҢҰЮDЧУЛЩ¶ИәН»¬ІоЈЁslipЈ©өД№АЛг»тңyБҝ¶шйgҪУ«@өГөДЎЈ
КёБҝҝШЦЖТӘЗуБЛҪвЮDЧУҙЕНЁөДО»ЦГЈ¬ІўҝЙТФЯ\УГҪK¶ЛлҠБчәНлҠүәЈЁІЙУГ AC ёР‘ӘлҠҷCөД„У‘BДЈРНЈ©өДЦӘЧRЈ¬НЁЯ^ёЯјүЛг·ЁҒнУӢЛгЎЈИ»¶шҸДҢҚ¬FөДҪЗ¶ИҝҙЈ¬ҢҰУЪУӢЛгЩYФҙөДРиЗуКЗЦБкPЦШТӘөДЎЈ
ҝЙТФІЙУГІ»Н¬өД·ҪКҪҒнҢҚ¬FКёБҝҝШЦЖЛг·ЁЎЈЗ°рҒјјРgЎўДЈРН№АЛгәНЧФЯm‘ӘҝШЦЖјјРg¶јҝЙУГУЪФцҸҠн‘‘ӘәН·Җ¶ЁРФЎЈ
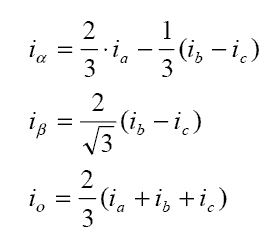
3ЎўACлҠҷCөДКёБҝҝШЦЖЈәЙоИлБЛҪв КёБҝҝШЦЖЛг·ЁөДәЛРДКЗғЙӮҖЦШТӘөДЮD“QЈәClarkЧғ“QЈ¬ParkЧғ“QәНЛьӮғөДДжЯ\ЛгЎЈІЙУГ Clark әН Park Чғ“QЈ¬Һ§ҒнҝЙТФҝШЦЖөҪЮDЧУ…^УтөДЮDЧУлҠБчЎЈЯ@ҳУЧцідФSТ»ӮҖЮDЧУҝШЦЖПөҪyӣQ¶Ё‘Ә№©‘ӘөҪЮDЧУөДлҠүәЈ¬ТФК№„У‘BЧғ»ҜШ“ЭdПВөДЮDҫШЧоҙу»ҜЎЈ
Clark Чғ“QЈәClark”өҢWЮD“QҢўТ»ӮҖИэПаПөҪyРЮёДіЙғЙӮҖЧшҳЛПөҪyЈә
ЖдЦР Ia әН Ib КЗХэҪ»»щңКГжөДҪMіЙІҝ·ЦЈ¬Io КЗІ»ЦШТӘөД homoplanar Іҝ·ЦЎЈ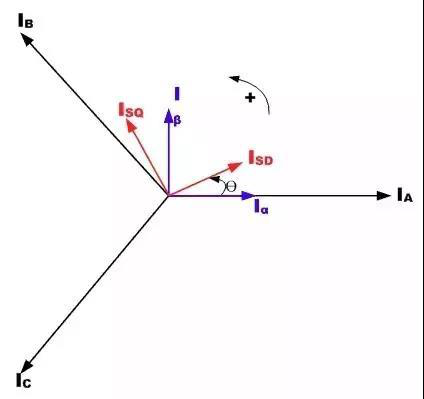
ҲD5ЈәИэПаЮDЧУлҠБчЕcЮD„У…ўҝјПөөДкPПө
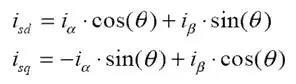
4ЎўParkЮD“QЈәPark ”өҢWЮD“QҢўлpПтмo‘BПөҪyЮD“QіЙЮD„УПөҪyКёБҝғЙПаҰБЈ¬ҰВҺ¬ұнКҫНЁЯ^ Clarke ЮD“QЯMРРУӢЛгЈ¬И»әуЭ”ИлөҪКёБҝЮD„УДЈүKЈ¬ЛьФЪЯ@АпЮD„УҪЗҰИЈ¬ТФ·ыәПёҪЦшУЪЮDЧУДЬБҝөД dЈ¬q Һ¬ЎЈёщ“юЙПКц№«КҪЈ¬ҢҚ¬FБЛҪЗ¶ИҰИөДЮD“QЎЈ
ACлҠҷCөДҙЕҲц¶ЁПтКёБҝҝШЦЖөД»щұҫҪYҳӢClarke Чғ“QІЙУГИэПалҠБч IAЈ¬IB ТФј° ICЈ¬ЖдЦР IA әН IB ФЪ№М¶ЁЧщҳЛ¶ЁЧУПаЦРөДлҠБчұ»Чғ“QіЙ Isd әН IsqЈ¬іЙһй Park Чғ“Q dЈ¬q ЦРөДФӘЛШЎЈЖдНЁЯ^лҠҷCНЁБҝДЈРНҒнУӢЛгөДлҠБч IsdЈ¬Isq ТФј°ЛІ•rБчБҝҪЗҰИұ»УГҒнУӢЛгҪ»БчёР‘ӘлҠҷCөДлҠ„УЕӨҫШЎЈ
ҲD6ЈәКёБҝҝШЦЖҪ»БчлҠҷCөД»щұҫФӯАнЯ@Р©Ң§іцЦөЕc…ўҝјЦөПа»ҘұИЭ^Ј¬ІўУЙPIҝШЦЖЖчёьРВЎЈ
ұн1ЈәлҠ„УҷCҳЛБҝҝШЦЖәНКёБҝҝШЦЖөДұИЭ^»щУЪКёБҝөДлҠҷCҝШЦЖөДТ»ӮҖ№МУРғһ„ЭКЗЈ¬ҝЙТФІЙУГН¬Т»ФӯАнЈ¬Яx“сЯmәПөД”өҢWДЈРНИҘ·Ц„eҝШЦЖёч·NоҗРНөД ACЎўPM-AC »тХЯ BLDC лҠҷCЎЈ
BLDCлҠҷCөДКёБҝҝШЦЖBLDCлҠҷCКЗҙЕҲц¶ЁПтКёБҝҝШЦЖөДЦчТӘЯx“сЎЈІЙУГБЛFOCөДҹoЛўлҠҷCҝЙТФ«@өГёьёЯөДР§ВКЈ¬ЧоёЯР§ВКҝЙТФЯ_өҪ95%Ј¬ІўЗТҢҰлҠҷCФЪёЯЛЩ•rТІК®·ЦУРР§ВКЎЈ

ҲD7
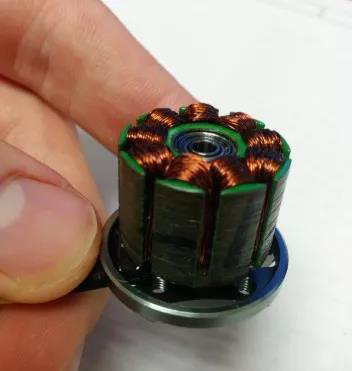
ІҪЯMлҠҷCҝШЦЖНЁіЈІЙУГлpПттҢ„УлҠБчЈ¬ЖдлҠҷCІҪЯMУЙ°ҙнҳРтЗР“QА@ҪMҒнҢҚ¬FЎЈНЁіЈЯ@·NІҪЯMлҠҷCУР 3 ӮҖтҢ„УнҳРтЈә
ўЩҶОПаИ«ІҪЯMтҢ„УЈә
ФЪЯ@·NДЈКҪЦРЈ¬ЖдА@ҪM°ҙИзПВнҳРтјУлҠЈ¬AB/CD/BA/DCЈЁBA ұнКҫА@ҪM AB өДјУлҠКЗ·ҙ·ҪПтЯMРРөДЈ©ЎЈЯ@Т»нҳРтұ»·QһйҶОПаИ«ІҪЯMДЈКҪЈ¬»тХЯІЁтҢ„УДЈКҪЎЈФЪИОәОТ»ӮҖ•rйgЈ¬Ц»УРТ»ПајУлҠЎЈ
ўЪлpПаИ«ІҪЯMтҢ„УЈә
ФЪЯ@·NДЈКҪЦРЈ¬лpПаТ»ЖрјУлҠЈ¬ТтҙЛЈ¬ЮDЧУҝӮКЗФЪғЙӮҖҳOЦ®йgЎЈҙЛДЈКҪұ»·QһйлpПаИ«ІҪЯMЈ¬Я@Т»ДЈКҪКЗғЙҳOлҠҷCөДіЈ‘BтҢ„УнҳРтЈ¬ҝЙЭ”іцөДЕӨҫШЧоҙуЎЈ
ўЫ°лІҪЯMДЈКҪЈә
Я@·NДЈКҪҢўҶОПаІҪЯMәНлpПаІҪЯMҪYәПФЪТ»ЖрјУлҠЈәҶОПајУлҠЈ¬И»әулpПајУлҠЈ¬И»әуҶОПајУлҠЎӯЈ¬ТтҙЛЈ¬лҠҷCТФ°лІҪЯMФцБҝЯ\ЮDЎЈЯ@Т»ДЈКҪұ»·Qһй°лІҪЯMДЈКҪЈ¬ЖдлҠҷCГҝӮҖ„оҙЕөДУРР§ІҪҫаҪЗңpЙЩБЛТ»°лЈ¬ЖдЭ”іцөДЕӨҫШТІЭ^өНЎЈ
ТФЙП3·NДЈКҪҫщҝЙУГУЪ·ҙ·ҪПтЮD„УЈЁДж•rбҳ·ҪПтЈ©Ј¬Из№ынҳРтПа·ҙ„tІ»РРЎЈ
НЁіЈЈ¬ІҪЯMлҠҷCҫЯУР¶аҳOЈ¬ТФұгңpРЎІҪҫаҪЗЈ¬ө«КЗЈ¬А@ҪMөД”өБҝәНтҢ„УнҳРтКЗІ»ЧғөДЎЈ
НЁУГлҠҷCөДЛЩ¶ИҝШЦЖЈ¬МШ„eКЗІЙУГ 2 ·NлҠВ·өДлҠҷCЈә
▪ ПаҪЗҝШЦЖ
▪ PWM ”ШІЁҝШЦЖ
ўЩПаҪЗҝШЦЖ
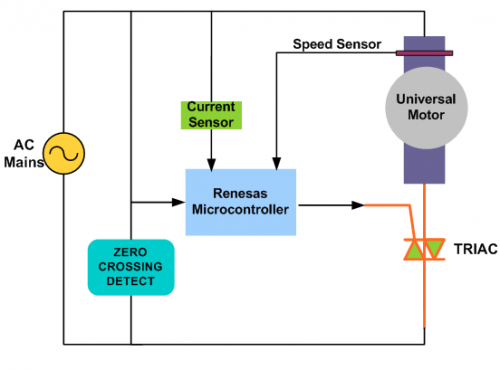
ПаҪЗҝШЦЖКЗНЁУГлҠҷCЛЩ¶ИҝШЦЖөДЧоәҶҶОөД·Ҫ·ЁЎЈНЁЯ^ TRIAC өДьc»ЎҪЗөДЧғ„УҒнҝШЦЖЛЩ¶ИЎЈПаҪЗҝШЦЖКЗ·ЗіЈҪӣқъөДҪвӣQ·Ҫ°ёЈ¬ө«КЗЈ¬Р§ВКІ»М«ёЯЈ¬ТЧУЪлҠҙЕёЙ”_ЈЁEMIЈ©ЎЈ
ҲD8ұнГчБЛПаҪЗҝШЦЖөДҷCАнЈ¬КЗTRIACЛЩ¶ИҝШЦЖөДөдРН‘ӘУГЎЈTRIACйTГ}ӣ_өДЦЬПаТЖ„У®aЙъБЛУРР§ВКөДлҠүәЈ¬ҸД¶ш®aЙъБЛІ»Н¬өДлҠҷCЛЩ¶ИЈ¬ІўЗТІЙУГБЛЯ^БгҪ»ІжҷzңyлҠВ·Ј¬ҪЁБўБЛ•rРт…ўҝјЈ¬ТФСУЯtйTГ}ӣ_ЎЈ
ўЪPWM ”ШІЁҝШЦЖ
PWM ҝШЦЖКЗНЁУГлҠҷCЛЩ¶ИҝШЦЖөДЈ¬ёьПИЯMөДҪвӣQ·Ҫ°ёЎЈФЪЯ@Т»ҪвӣQ·Ҫ°ёЦРЈ¬№ҰВК MOSFETЈ¬»тХЯ IGBT ҪУНЁёЯоlХыБч AC ҫҖлҠүәЈ¬ЯM¶шһйлҠҷC®aЙълS•rйgЧғ»ҜөДлҠүәЎЈ
ҲD9ЈәНЁУГлҠҷCөД PWM ”ШІЁҝШЦЖ
Ждй_кPоlВК·¶ҮъТ»°гһй10-20KHzЈ¬ТФПыіэФлВ•ЎЈЯ@Т»НЁУГлҠҷCөДҝШЦЖ·Ҫ·ЁҝЙТФ«@өГёьјСөДлҠБчҝШЦЖәНёьјСөДEMIРФДЬЈ¬ТтҙЛР§ВКёьёЯЎЈ |