1 ACM6753 I2C控制模式注意點
很多帶電池的便攜式產品由于本身有個小MCU在系統上,為了更加靈活的做一些策略性的電機控制,采用I2C 控制的方式來利用ACM6753進行電機的調速、正反轉以及剎車控制等.
ACM6753上電默認是外部SPEED管腳模擬電壓調速模式,當SPEED管腳(pin 5)外部電壓不為零時,上電后 ACM6753檢測到該管腳電壓為非零值就會認為收到調速指令,但是此時電機參數還沒有通過I2C指令配置進來,必 然會產生失步錯誤,從而停留在這個錯誤報警狀態長達5秒鐘, 造成較長的啟動延時. 因此在使用I2C控制ACM6753 時要么“避免在初始化之前SPEED管腳為非零值(>0.2V)”, 要么“在ACM6753上電后 300ms以內迅速用I2C指令將 速度配置為0,然后開始初始化電機相關參數” .
通常電池類便攜產品設計往往追求低功耗, ACM6753提供業界有競爭力的低功耗性能. 在休眠模式下,VCC上電 流不到20uA; 在待機模式下,VCC上電流不到150uA. 后面詳細描述兩種模式下的I2C控制策略

2 待機模式 (Standby Mode)

如果對功耗不是追求極致,可以接受150uA的待機電流,可以用待機模式,建議“SPEED管腳下拉到地”, 所有調速/方向控制/剎車控制都由I2C控制.
3 休眠模式 (Sleep Mode)

以上都是硬件(程序燒寫固化)模式下的休眠模式操作方法. 如果客戶想用I2C控制,同時又想用休眠模式, 具 體方法如下:
1) 第一次上電→Speed管腳 (pin5)設置為高電平→300ms以內用I2C命令將速度設置為0(通過 0x01和0x02寄存器)→然后初始化其他電機運轉參數相關寄存器,同時將0x2c寄存器的bit1設 置為1→設置目標轉速以及正反轉/剎車等;
2) 進入休眠模式. 將Speed管腳設置為低電平, 進入休眠模式.
3) 下一次退出休眠模式. Speed管腳 (pin5)重新設置為高電平→300ms以內用I2C命令將速度設置 為0(通過0x01和0x02寄存器)→然后初始化其他電機運轉參數相關寄存器,同時將0x2c寄存 器的bit1設置為1→設置目標轉速以及正反轉/剎車等;
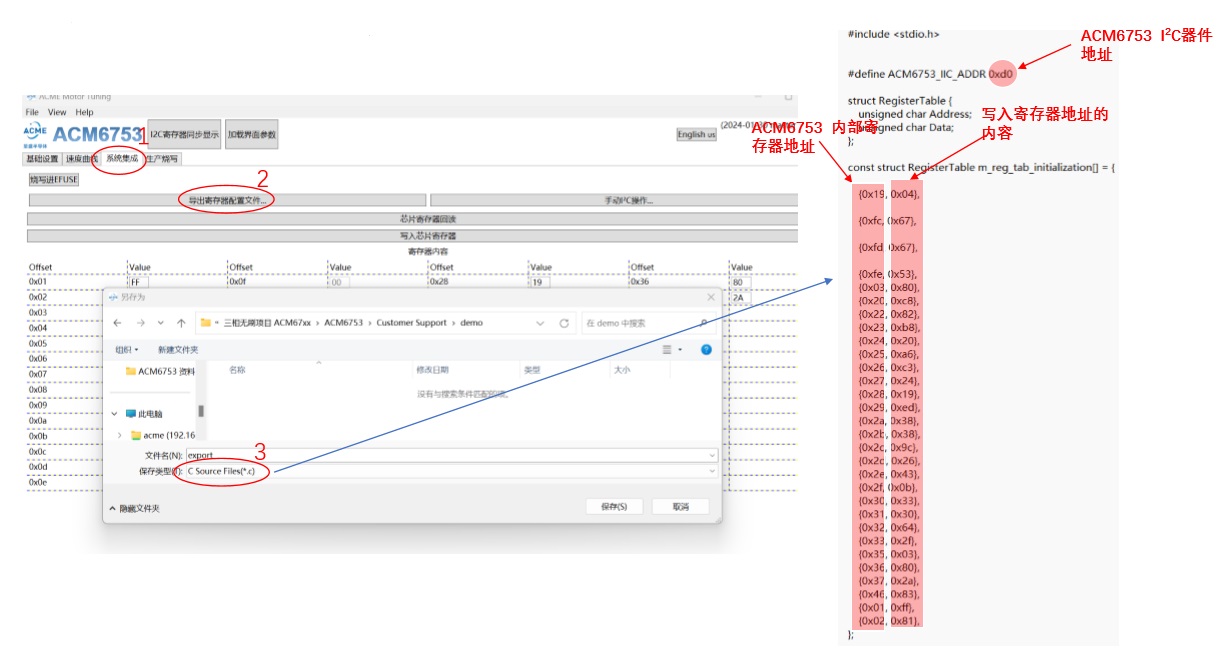
4 如何生成初始化腳
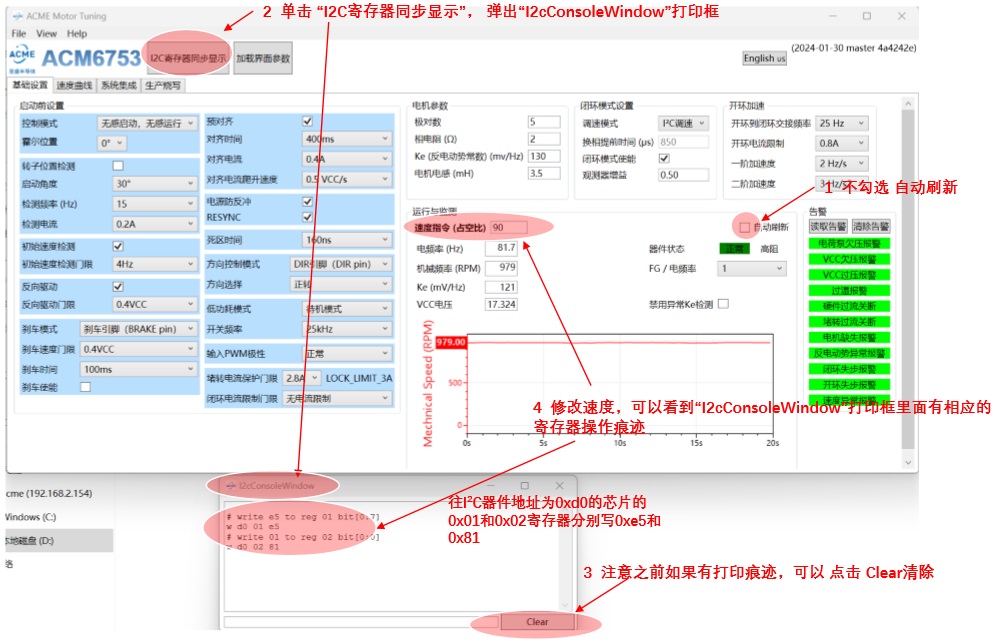
5 如何快速知道某項操作該操作哪個寄存器
|






