重點內容速覽:
·BLDC電機控制可使用專用芯片(ASSP)和通用MCU
·無傳感器的BLDC電機更普遍,控制算法硬件化
·集成化趨勢:整合預驅動、柵極驅動、電源管理
12月13日馬斯克發布了新一代人形機器人原型Optimus Gen 2,距離量產又近了一步。我國也在加速發展人形機器人,近期,工信部印發《人形機器人創新發展指導意見》,指出人形機器人有望成為繼計算機、智能手機、新能源汽車后的顛覆性產品,并且明確了人形機器人發展的目標與時間點。
目前,我國人形機器人產業鏈中游的本土制造廠商不在少數,包括優必選、達闥科技、小米、騰訊、傅利葉智能、小鵬汽車、追覓、宇樹、智元機器人等,其中只有優必選推出量產化產品,但成本昂貴。上游核心零部件廠商包括無框力矩電機廠商步科股份,空心杯電機廠商鳴志電器,減速器廠商綠的諧波、中大力德、雙環傳動,控制系統廠商匯川技術,編碼器與傳感器廠商昊志機電,行星滾柱絲杠廠商長盛軸承、秦川機床等。(備注:無框表示電機無外殼;空心杯表示電機沒有鐵芯轉子)

圖注:國內幾家主要人形機器人的關節電機對比(不完全統計,芯查查制表)
無框力矩電機、空心杯電機是機器人關節的關鍵部件,相比這2種電機,無刷直流電機(下文BLDC)是更廣義、普遍的電機類型,有分析認為常見的人形機器人關節電機屬于BLDC。
BLDC并不是新鮮事物,其幾乎無處不在,家用電器、辦公設備、電動工具、汽車電子系統等不勝枚舉,而諸如無人機、電動汽車,以及上述的機器人等新興應用也離不開BLDC。Allied Market Research估計,到2030年全球BLDC市場規模將從2020年的332億美元增長到722億美元。
圖注:2020-2030年BLDC電機的增長(圖源:Allied Market Research)
BLDC優勢包括能效高(通常高達92%);由于沒有任何電刷摩擦,可以更高速度運行;尺寸更緊湊、噪聲屬性更低,EMI曲線更佳等。但這些優勢也有代價,其控制的設計更加復雜,下面講述BLDC控制芯片在應用中的幾個趨勢。
專用芯片,還是通用MCU?
BLDC電機控制可以使用專用芯片(ASSP),也可以使用通用MCU。
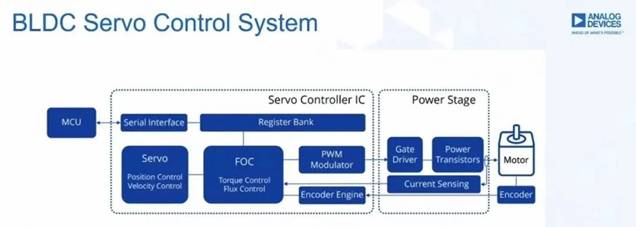
專用芯片通常集成電機控制所需的硬件模塊,比如PWM控制器、電流感應、位置傳感接口(通常是霍爾效應傳感器或編碼器接口)、以及保護電路等。專用芯片通常具有高效率、低功耗和小尺寸的優點,而且因為專門針對電機控制設計,往往提供優秀性能和穩定性。
圖注:BLDC電機控制系統(圖源:中電港)
對于BLDC電機控制專用芯片,供應商通常提供了門類齊全的專用芯片產品組合,例如ADI提供的模數/數模轉換器、放大器、嵌入式處理器、iCoupler®數字隔離器、電源管理器件和實時以太網解決方案。
在電機的伺服控制系統中,高精度電流和電壓檢測可提高速度和扭矩控制性能。使用電阻進行電流采樣的伺服系統中,采樣信號質量對電控制性能的影響至關重要,ADI提供基于Σ-Δ調制器的高性能解決方案。
位置檢測性能是伺服控制的關鍵,常常使用光學編碼器和旋轉變壓器作為位置傳感器。伺服控制技術從模擬向數字的轉換推動了現代伺服系統的發展,也滿足了對于電機控制的性能和效率的高要求。
從優先考慮安全和保護的角度,信號采樣和功率器件驅動應采用隔離技術。ADI的iCoupler數字隔離器產品可滿足高壓安全隔離要求。
相比專用芯片,基于通用MCU的BLDC電機控制有其優點——靈活、可編程。MCU通常包含一個或多個CPU核心以及各種外圍接口和外設,通過軟件編程實現電機控制算法。32位MCU具有足夠處理能力實現復雜電機控制算法,比如磁場定向控制(FOC,Field Oriented Control)。
例如Microchip AVR EB系列MCU可在BLDC電機系統中提供復雜的波形控制,調整速度、時序和波形形狀創建正弦波和梯形波形;片上外設只需極少編程即可實現多種功能,快速響應工作條件變化,可即時進行調整,延遲幾乎為零。此外可以獨立于CPU執行多項任務,例如讀取環境傳感器和串行通信,可降低整體BOM成本。
圖注:MCU可以在BLDC電機系統中提供復雜波形控制(圖源:Microchip)
選擇專用芯片還是通用MCU,取決于應用需求:
- 如果應用對成本敏感,且電機控制需求相對簡單,專用芯片ASSP可能是一個更好選擇,因為具有較低成本和較高集成度。
- 如果應用需要更高靈活性、可擴展性或者需要執行復雜任務,那么通用MCU可能更適合。雖然初始開發成本較高,但MCU的靈活性可以適應未來設計變更和功能升級。
在實際應用中,設計可能會結合專用電機控制芯片和通用MCU,各司其職,專用芯片處理電機控制的特定任務,MCU負責更高層次的系統控制和通信功能,這種混合方案可以兼顧性能、成本和靈活性。
無傳感器或更加普遍,控制算法硬件化
無傳感器的BLDC電機或許會更加普遍,這就需要通過控制算法實現電機運行狀態的監測和控制。
從性能和復雜度來看,電機控制算法發展路線從最初的120度方波控制,到有感SVPWM、逐步發展到有感FOC、最后到無感FOC控制算法——控制算法越來越復雜,開發門檻越來越高。為了便于用戶使用最新和最優控制方案,電機控制算法通過硬件化降低開發門檻是必然趨勢。
早期的MCU純軟件算法開發方式,迅速被智能集成的硬件化替代,從方波算法ASIC化、類正弦算法ASIC化、集成MDU、Cordic等,到最后無感FOC算法ASIC化等一系列的變化,實現電機控制算法硬件化的演變。
圖注:Renesas MPU+Lattice FPGA雙芯片架構,在實現算法加速的同時支持EtherCAT開放架構(圖源:中電港)
除了ASIC,FPGA也被用于實現FOC控制算法,例如中電港聯合全球知名半導體解決方案供應商瑞薩電子及萊迪思半導體推出高性能EtherCAT伺服驅動解決方案,采用Renesas MPU+Lattice FPGA雙芯片架構。
在這個方案中,電流環控制放在FPGA里進行硬件加速,大幅降低延時,讓電流環更快速,提高精確度。FPGA在實現多軸同步控制、電流環控制、PWM控制和輸出等方面更具優勢,此外,FPGA可靈活搭配不同型號,實現1-6軸電機控制,成本上更具優勢。Renesas RZ/T1 MPU內部集成了EtherCAT硬核控制器,集成度更高,控制的實時性更好。
集成化趨勢:整合預驅動、柵極驅動、電源管理等
高集成是BLDC電機控制芯片的另一個趨勢,從完全分離、到集成運放和比較器、集成預驅動、集成電源和MOSFET、再到全集成模塊。在人形機器人設計中,高度集成的芯片有助于實現小型化和輕量化。以安森美ecoSpin BLDC電機控制器系列為例,將控制和驅動器集成在一個芯片,簡化HVAC、制冷和機器人等應用中高壓電機控制系統的開發,該系列產品之一ECS640A集成6個柵極驅動器輸出,為外部功率器件提供350mA/650mA(典型值)柵極電流灌/拉電流,霍爾傳感器輸入支持有傳感器或無傳感器操作。
圖注:BLDC電機控制MCU集成柵極驅動有助于簡化人形機器人設計,圖例安森美ecoSpin系列產品(圖源:安森美)
小 結
人形機器人是當前高科技領域的熱點應用之一,高精度動作控制和姿態調整要求其使用的電機具有極高的精度和動態響應能力,同時要求系統處理多個電機的控制任務,確保協調和同步,此外,人形機器人需要在有限的空間內集成大量的電子和機械組件,比如電機和控制器。綜合來看,BLDC電機相比傳統電機更符合上述人形機器人的需求,這勢必帶動BLDC電機控制芯片的發展,本文概括了這類芯片的產品和方案的應用。 |