電機控制在實現這些承諾方面發揮著主要作用,理解基本原理是實現目標的第一步。無刷直流(BLDC)電機管理的電機控制的關鍵要素,以及它如何在降低成本、節省空間和提高性能的同時提高效率。
1、不同的電機類型
有幾種類型的電機控制拓撲可用:有刷、無刷直流(BLDC)、步進和感應。兩種最密切相關的無刷電機類型是BLDC和永磁同步電機(PMSM)。
無刷電機在當今的許多應用中變得非常流行,因為它們消除了對電機電刷的需要。這些BLDC拓撲使用換向邏輯來移動轉子,使其更加高效和可靠。
有刷電機的換向由電刷/換向器接口產生。該界面會導致摩擦和電弧,隨著時間的推移會降低電刷的性能。這種摩擦會產生熱量并縮短電機壽命。
與有刷電機相比,BLDC電機具有許多優點。它們節能、更小、更輕、更安靜、更可靠且更耐用。此外,它們提供精確的速度控制,更適合變速應用。
2、了解BLDC和PMSM型電機
BLDC和PMSM電機根據同步電機的原理工作。轉子在每次換向時繼續追逐定子,因此電機連續運動。然而,這兩種直流電機的定子繞組具有不同的幾何形狀,因此它們會產生不同的反電動勢(BEMF)響應。BLDC BEFM是梯形的。PMSM電機具有正弦BEMF,因此線圈繞組以正弦方式纏繞。為了最大限度地提高性能,這些電機通常使用正弦波換向。

BLDC和PMSM電機在運行時通過其繞組產生BEMF。在任何電機中,由于運動,產生的電動勢稱為反電動勢(BEMF),因為電機中感應的電動勢與發電機的電動勢相反。
3、磁場定向控制的解釋
要獲得控制PMSM電機的正弦波形,需要磁場定向控制(FOC)算法。FOC通常用于最大限度地提高PMSM三相電機的效率。PMSM的正弦控制器比BLDC梯形控制器更復雜、成本更高。然而,這種成本增加帶來的優點是電流波形中的噪聲更低和諧波更少。BLDC的主要優點是更易于控制。最終,選擇哪種電機最好取決于其應用。
4、帶傳感器和無傳感器的BLDC和PMSM電機
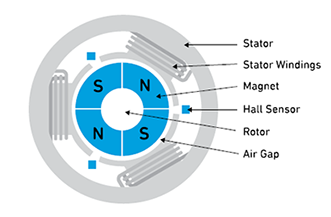
BLDC和PMSM電機可以是帶傳感器或無傳感器的。帶傳感器的電機用于需要電機在負載條件下啟動的應用。他們使用嵌入電機定子中的霍爾傳感器。傳感器本質上是一個開關,其數字輸出等于感測到的磁場極性。電機的每相都需要一個單獨的霍爾傳感器。因此,三相電機需要三個霍爾傳感器。無傳感器電機需要算法來使用電機作為傳感器進行操作。他們依賴于BEMF信息。通過對BEMF進行采樣,可以推斷出轉子位置,從而無需使用基于硬件的傳感器。無論電機拓撲結構如何,控制這些機器都需要知道轉子位置,以便可以有效地換向電機。
5、電機控制軟件算法
軟件算法(即設計用于執行特定任務的一組指令),如計算機程序,用于控制BLDC和PMSM電機。這些軟件算法通過監視和控制電機運行來提高效率并降低運營成本。算法的一些主要功能是電機初始化、霍爾傳感器轉子位置檢測以及用于增加或減少電流參考的開關信號檢查。
6、控制器如何處理電機傳感器信息
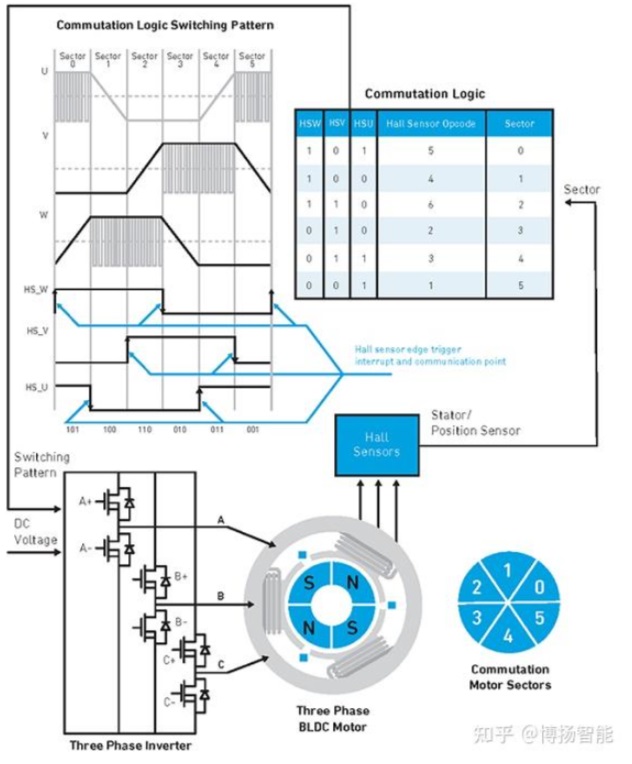
三相BLDC電機有六個狀態。如下圖所示,三位代碼可用于表示1到6之間的操作碼編號。放置傳感器以使用八個操作碼中的六個(1到6)提供三位數據輸出。此信息很有用,因為控制器可以確定何時發出了非法操作碼并根據合法操作碼(1到6)采取行動。如下所示,該算法獲取霍爾傳感器操作碼并對其進行解碼。當霍爾傳感器操作碼的值發生變化時,控制器改變通電方案以實現換向。微控制器使用操作碼從查找表中提取通電信息。在三相逆變器用新的扇區命令通電后,磁場移動到新的位置,推動轉子隨之移動。
|