電機驅動的一大關鍵是準確知道轉子的位置,有感電機通過傳感器獲取轉子位置,無感電機只能通過間接方式獲取電機轉子位置,常見的方法有反電動勢法、電感法、磁鏈法、高頻脈沖法及其它智能方法,應用最多的是反電動勢法
反電動勢法無刷無感電機驅動電路可主要分為三部分:功率驅動部分,控制部分,轉子位置檢測部分
一. 功率驅動部分
功率驅動部分有二種實現方式,一是使用集成電機驅動IC,二是使用分立元件搭建。使用集成IC更加簡單,而且大多驅動IC都集成了多種保護功能,更加可靠,但成本較高。
使用分立元件搭建有二種:
① 使用N + P管,如下圖,這種方式實現簡單,而且PWM控制信號占空比能達到100%,但P管價格相對較高,一般電流在100A,耐壓在100V內,多應用于低壓小功率應用
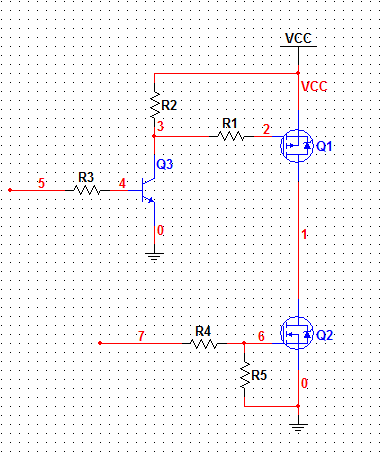
R1,R4一般在100Ω以內,但也不能太小,一般為幾十Ω,R2,R3,R5一般為幾K到幾十K
②使用全N管,如下圖,N管耐壓及功率可選范圍很寬,所以適用于各種應用電路,但上臂橋驅動較復雜,如果采用自舉升壓電路,PWM占空比不能達到100%
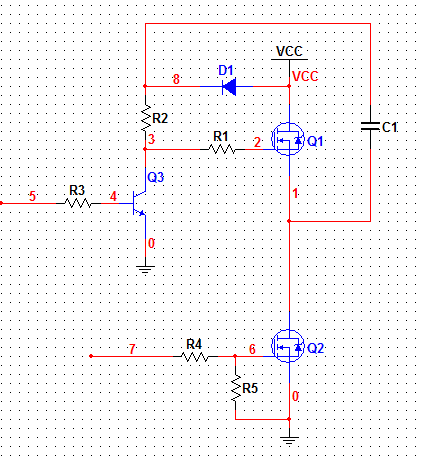
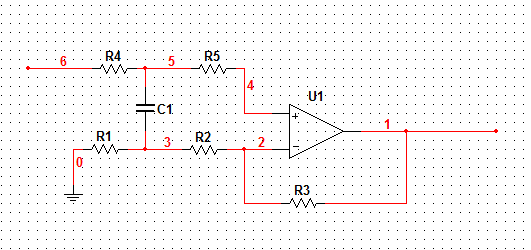
上圖用比較簡單的方式實現上臂的自舉升壓,D1為自舉二極管,一般采用快恢復二極管,C1為自舉電容,具體大小可參考公式
二. 控制部分
此部分大致為MCU最小系統,根據所采用的MCU的不同而不同,一般使用內部晶振。帶有比較器、PWM定時器的MCU為比較好的選擇。
三. 轉子位置檢測部分
此部分是一個關鍵部分,根據使用驅動方法的不同而不同,主要的二種為反電動勢檢測與電流檢測
①反電動勢檢測
此法的理論基礎是電機在運轉時會產生反電動勢,在PWM導通器件的過零時刻,懸浮相的端電壓與中點電壓相等,硬件方法可建立一個虛擬中性點與端電壓比較,實際中大多使用軟件采樣比較方式
使用軟件進行采樣有三種方式:
1. 在功率管導通時刻采樣
二相導通時,中點電壓等于母線電壓的一半,因此可用母線電壓的一半作為參考電壓與第三相進行比較。
母線電壓一般較高,即使分半之后的電壓也可能高于MCU端口承受電壓,因此一般要用電阻進行分壓,這使得過零點的檢測靈敏度受到影響,而且由于在導通時間內進行采樣,因此必須有一個最小導通時間,電機低速運行受限制
2. 在功率管關閉時刻進行采樣
在上管關斷,下管恒通的狀態下,續流電流會流過下管體二極管,中點電壓理論值為0,為提高準確性,可將MCU內部參考電壓設為一個略高于0的值,如0.2,然后采集第三相與此值比較。
這種方式無需電阻分壓,提高了檢測靈敏度,同時抑制了高頻開關干擾,但需考慮MCU端口承壓能力,而且需保持一個最小關斷時間,因此PWM占空比無法達到100%
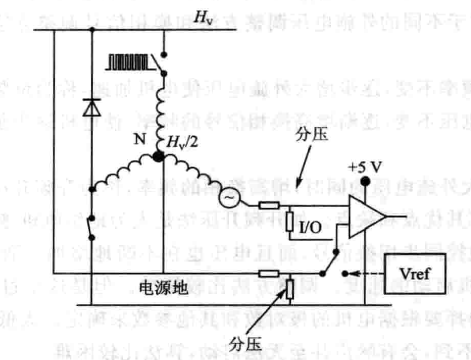
3. 在功率管全狀態采樣
如下圖,此種方法結合了以上二種方法的優點,克服了雙方的缺點
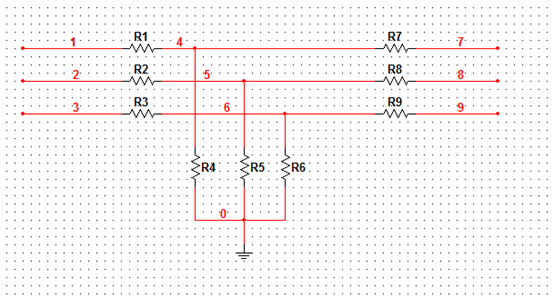
在大多數實際應用電路中,多采用方式一,如下圖,兩端分別接到電機三線與MCU
②電流檢測法
此法多應用于FOC控制中,如下,在三端回路中接上電流采樣電阻,采集相電流,經放大器放大后送入MCU,
轉載于:https://www.cnblogs.com/yueze/p/6995378.html |





